







산업:
식품
왜 아스파라거스는 유럽에서 가장 비싼 야채 중 하나일까요? 왜냐하면 아스파라거스는 사람이 하나하나 힘들게 수확해야 하기 때문입니다. 로봇이 이 모든 것을 바꿔줄 수 있습니다. 브리먼 메카트로닉스 센터 (Bremen Centre for Mechatronics, BCM)에서는 현재 HepcoMotion의 정밀 레일과 수확 장비를 결합시켜 이러한 수확 로봇을 개발 중에 있습니다 – 리니어 가이던스 시스템 전문가.
아스파라거스의 인기는 영국에서 꾸준히 증가하고 있습니다. 하지만 농부들에게는 봄철의 스트레스이기도 합니다. 왜냐하면 매우 짧은 기간 동안에 어마어마한 양을 수확해야 하기 때문입니다. 연방통계국에 의하면 2015년 아스파라거스 수확량은 112,100톤에 달했습니다. 농부들은 줄기 하나하나를 일일이 잘라내어 수확해야 하기 때문에 수확 작업은 매우 고됩니다. 일꾼들을 구하기는 점점 어려워지고 있고 인건비는 비싸기 때문에 아스파라거스의 값은 높을 수 밖에 없습니다.
로봇은 카메라를 이용해 어느 아스파라거스 줄기가 수확할 준비가 되었는지를 찾습니다.
이 때문에 자동화가 요구되고 있으며 아스파라거스 수확에 적용되기 시작한지도 꽤 되었습니다. 다양한 방법들이 있어왔지만 아직까지 아스파라거스 수확에 있어서 기계가 인간을 뛰어넘지는 못했습니다. 이에, 그린 아스파라거스 수확 로봇 시스템 프로젝트 (green asparagus harvesting robotic system project, 이하 Garotics)에 의해 그린 아스파라거스 수확 로봇 개발이 시작되었습니다. 브리먼 메카트로닉스 센터(Bremen Centre for Mechatronics, BCM), 독일 북스테후데(Buxtehude)에 소재한 포장기계제조사 Strauss, 영국 농업회사 C. Wright & Son이 현재 프로젝트에 참여하고 있습니다.
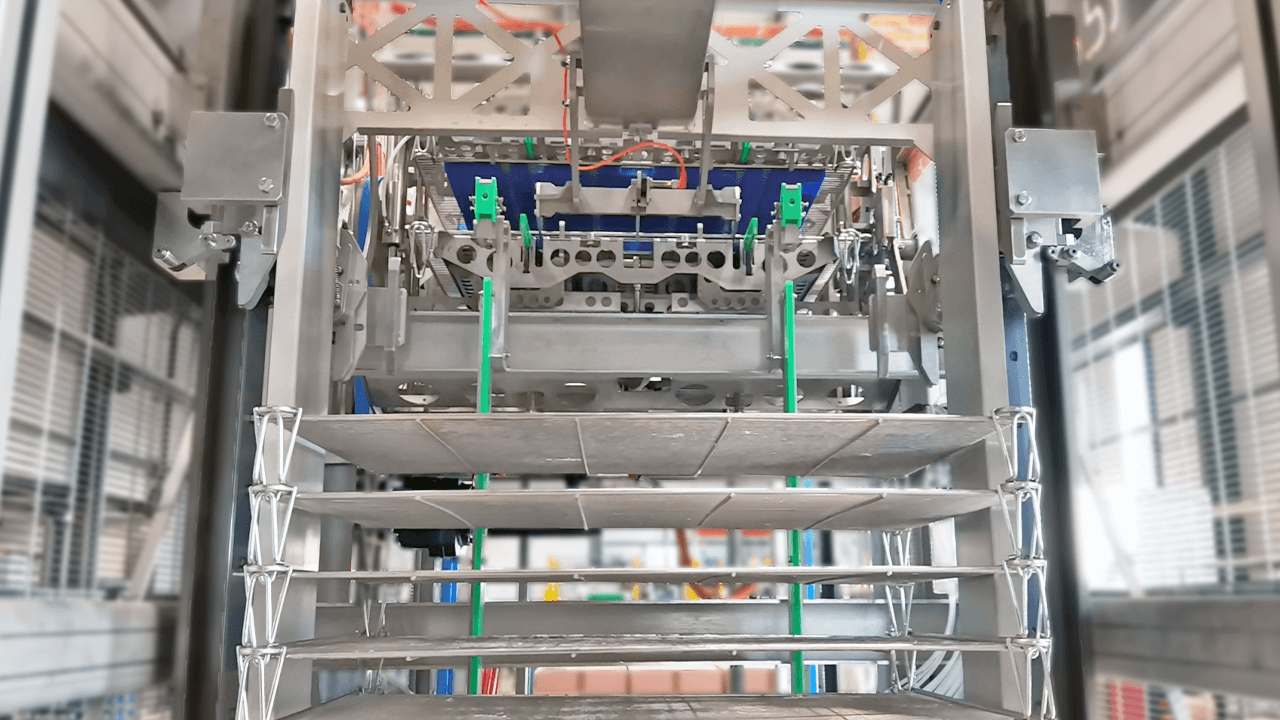
수확 로봇은 4륜 차체와 전륜 구동이 기본 구성입니다. 앞바퀴 사이에는 카메라가 설치되어 있어 지나가면서 그린 아스파라거스의 줄기를 촬영합니다. 화이트 아스파라거스와 달리 그린 아스파라거스는 지상에서 자랍니다. 사진처리 소프트웨어는 수확해도 될 만큼 성숙한 줄기를 찾습니다.

“잔디 깎는 기계처럼 다 밀어버리는 기계를 개발할 수는 없습니다. 아스파라거스는 성장하는 속도가 다 다르기 때문이지요. 그래서 사진처리 소프트웨어를 도입하여 아스파라거스의 자라는 속도를 분별할 수 있게 한 것입니다”
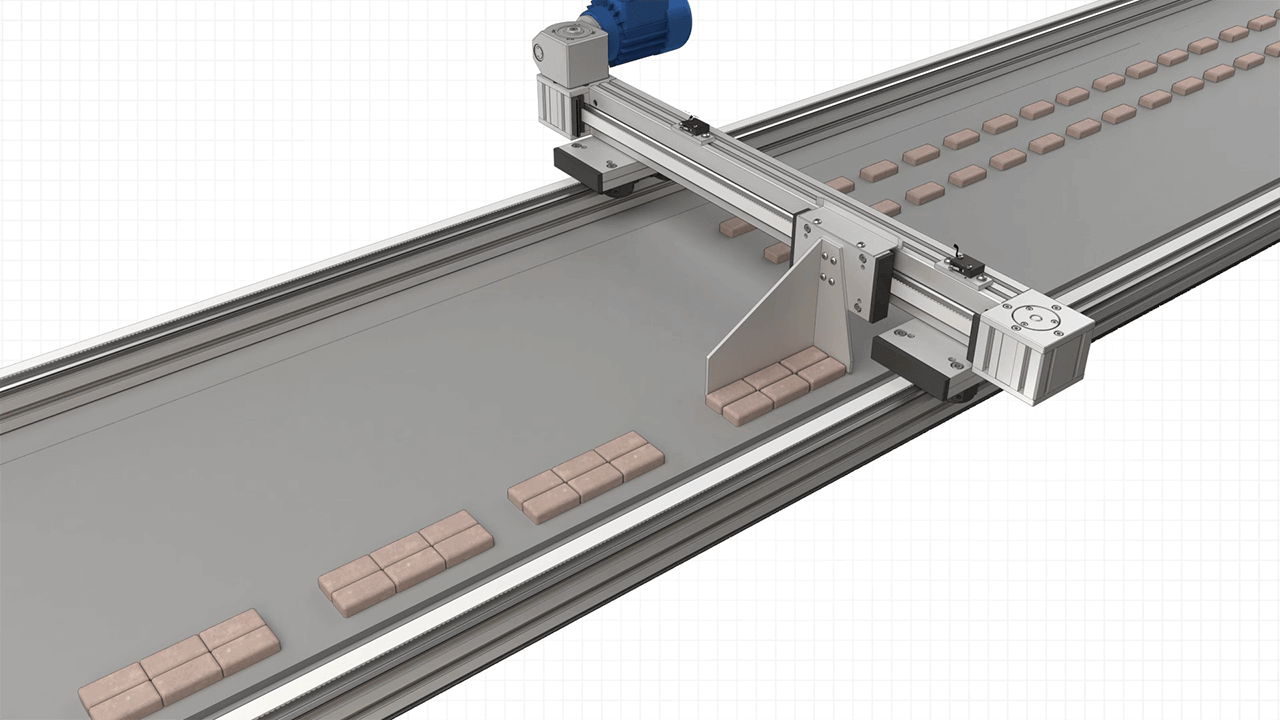
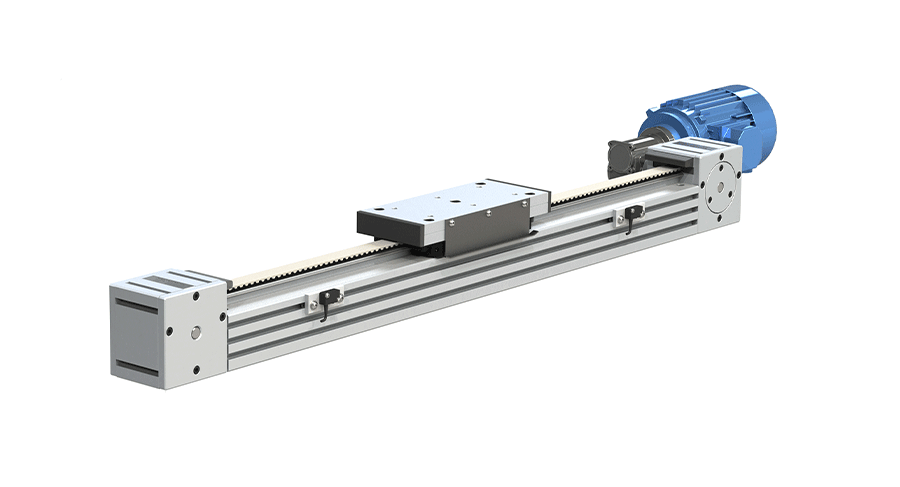
HepcoMotion의 리니어 가이드 레일로 수확장비를 정확한 위치에 놓을 수 있도록 합니다.
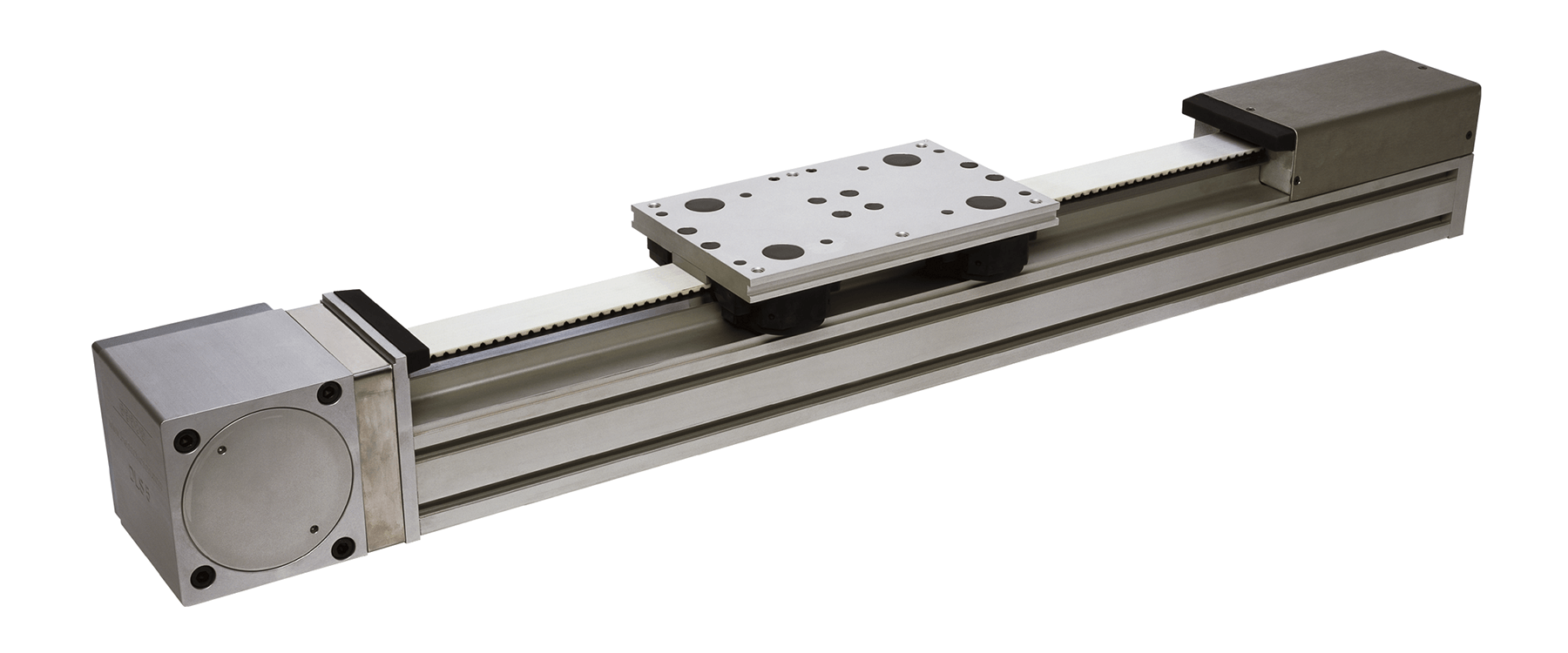
소프트웨어는 HepcoMotion의 스테인리스 스틸로 만든 강화 정밀 리니어 가이드레일 아래에 장착된 작업 헤드를 충분히 성숙한 아스파라거스 줄기 쪽으로 안내합니다. 벨트 구동 캐리지에서 작업 헤드는 차체 넓이 내에서 자유롭게 좌우로 움직일 수 있습니다.
드라이빙 동력은 리니어 가이드 레일 옆에 위치한 웜기어의 AC 모터로부터 나옵니다. 독일 북부 HepcoMotion의 지역매니저인 Mark Völkers씨는, “DLS 시스템의 모터는 1.1 kW까지 힘을 낼 수 있어 5:1에서 75:1의 속도로 돌아갑니다. 이는 최대 750뉴튼의 드라이빙 동력과 초당 1.4미터의 속도를 가능하게 하며, 특수 모터로는 1초에 5미터를 움직일 수 있습니다”. 수확 로봇은 2개의 작업 헤드로 동시에 움직이며 2개의 레일에서 독립적으로 움직여 높은 작업 처리율을 보여줍니다.
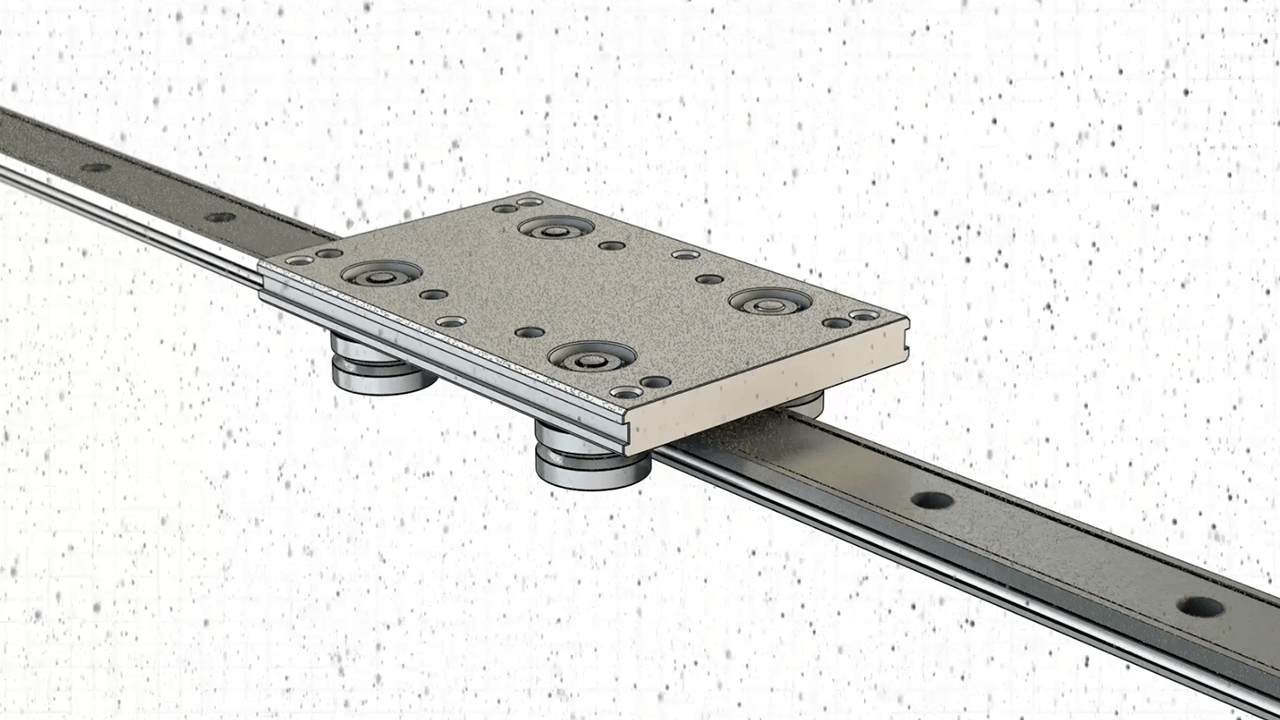
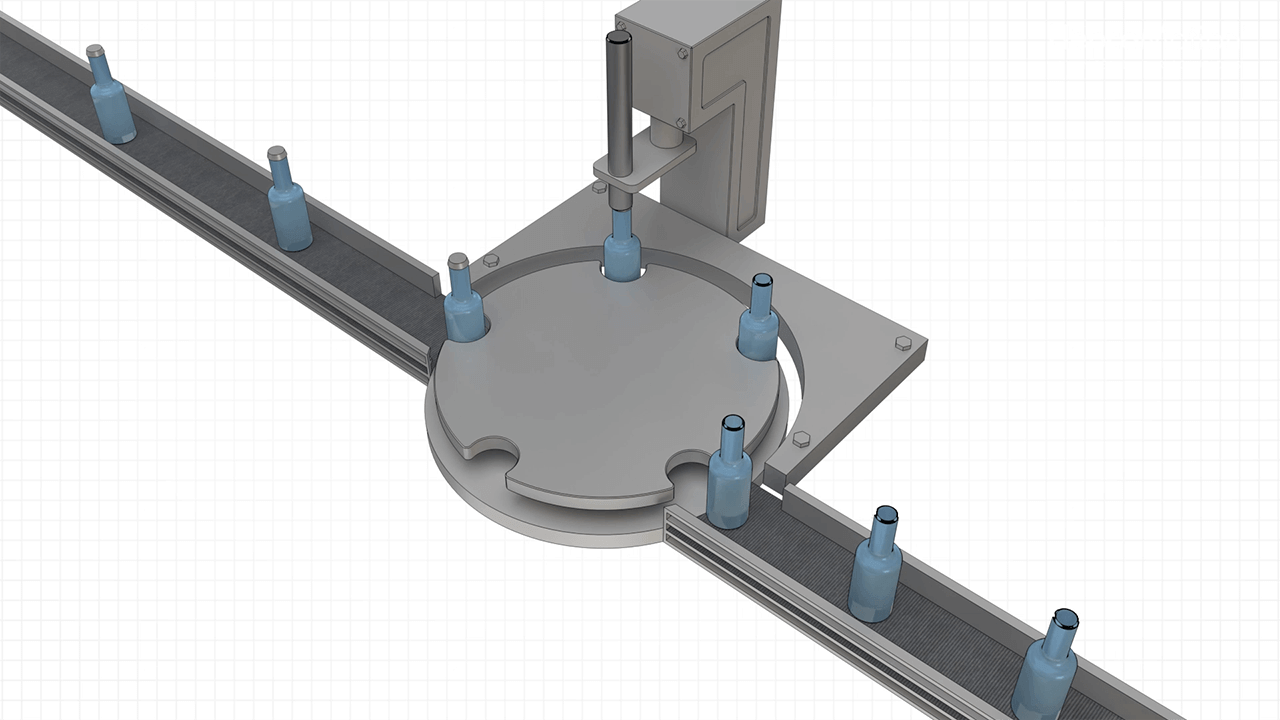
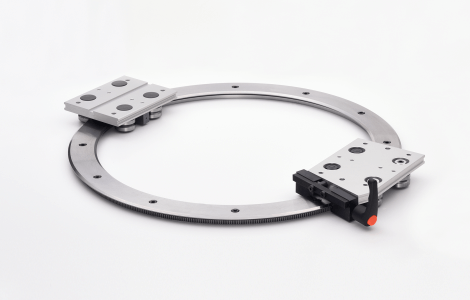
HepcoMotion의 링 세그먼트는 하나의 드라이브로 회전 동작까지 가능하게 합니다.
작업 헤드가 포지셔닝되면 뒤로부터 팔을 아래로 내립니다. 이러한 움직임을 위해서 엔지니어들은 또 다른 HepcoMotion 시스템을 사용했습니다. 바로 PRT2입니다. 이 시스템은 다양한 스테인리스 스틸 링과 링 세그먼트로 구성되어 있습니다. 직선 가이드 레일과도 함께 사용하여 트랙 내에서 다양한 개폐형 섹션을 가지는 트랙을 구축할 수 있습니다. 아스파라거스 로봇은 작업 헤드 양쪽이 90도로 꺾여 있고 아래로 직선 부품이 장착되어 있습니다. 로봇의 팔은 V 가이드 베어링으로 편심 및 동심 방향으로 캐리지에 결합되어 있습니다. 롤러들은 링 세그먼트의 V 트랙의 아래와 위에서 맞물려 움직입니다.

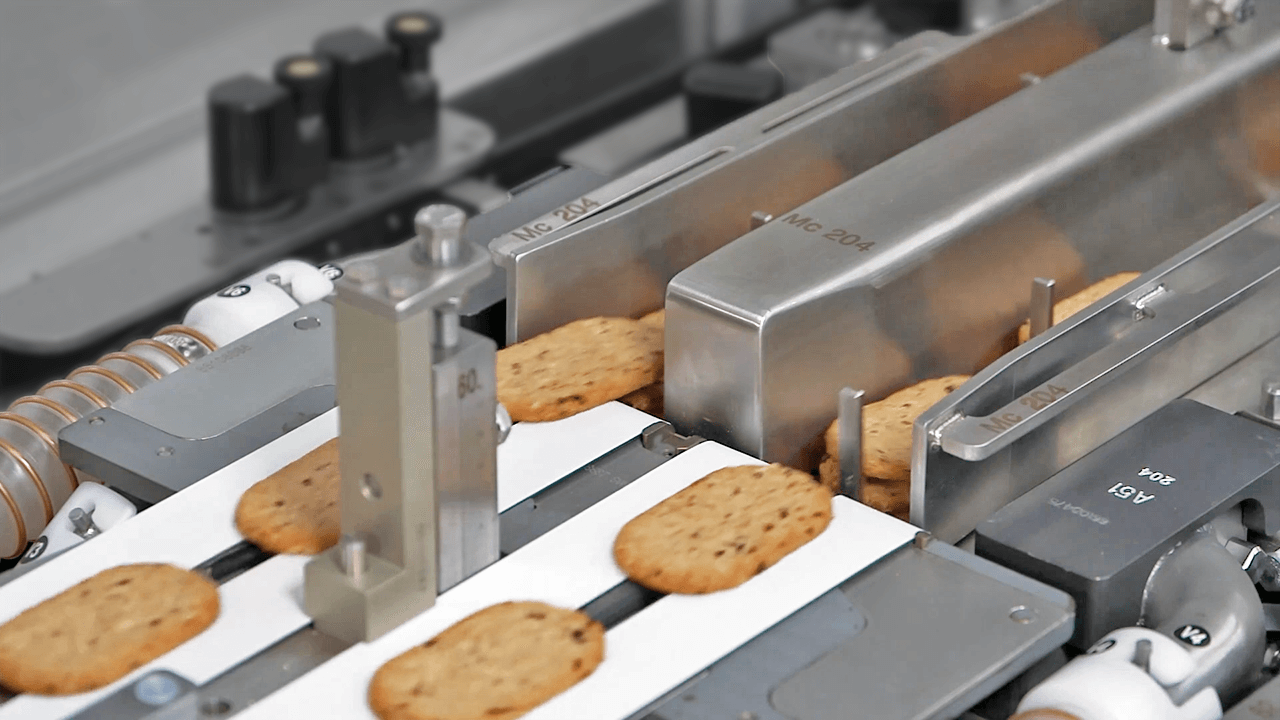
움직임은 25mm 너비의 레일에서 캐리지와 로봇팔을 당기는 타이밍 벨트에 의해 영향을 받아 중심축기반의 움직임을 만들어냅니다. 모터는 작업 헤드 바깥 쪽에 장착이 되어있습니다. 로봇팔이 내려가면 공기압 실린더는 줄기를 자르는 동작과 작물을 잡는 동작을 동시에 하고 로봇은 1초에 0.5미터의 속도로 멈추지 않고 움직입니다. 전체 작업 헤드는 이후 옆으로 움직여 컨베이어 벨트에 수확한 아스파라거스를 가져다 놓습니다.
“레일 시스템 덕분에 직선 운동과 로봇팔의 회전이 작은 공간에서도 가능하다는 것이 이 시스템이 특별한 이유입니다. 롤러 가이드를 통해 로봇팔을 빠르게 내릴 수가 있습니다. 팔을 내릴 때 리니어 운동과 회전을 통해 아스파라거스 2개 사이의 짧은 거리를 통과할 수 있습니다.”
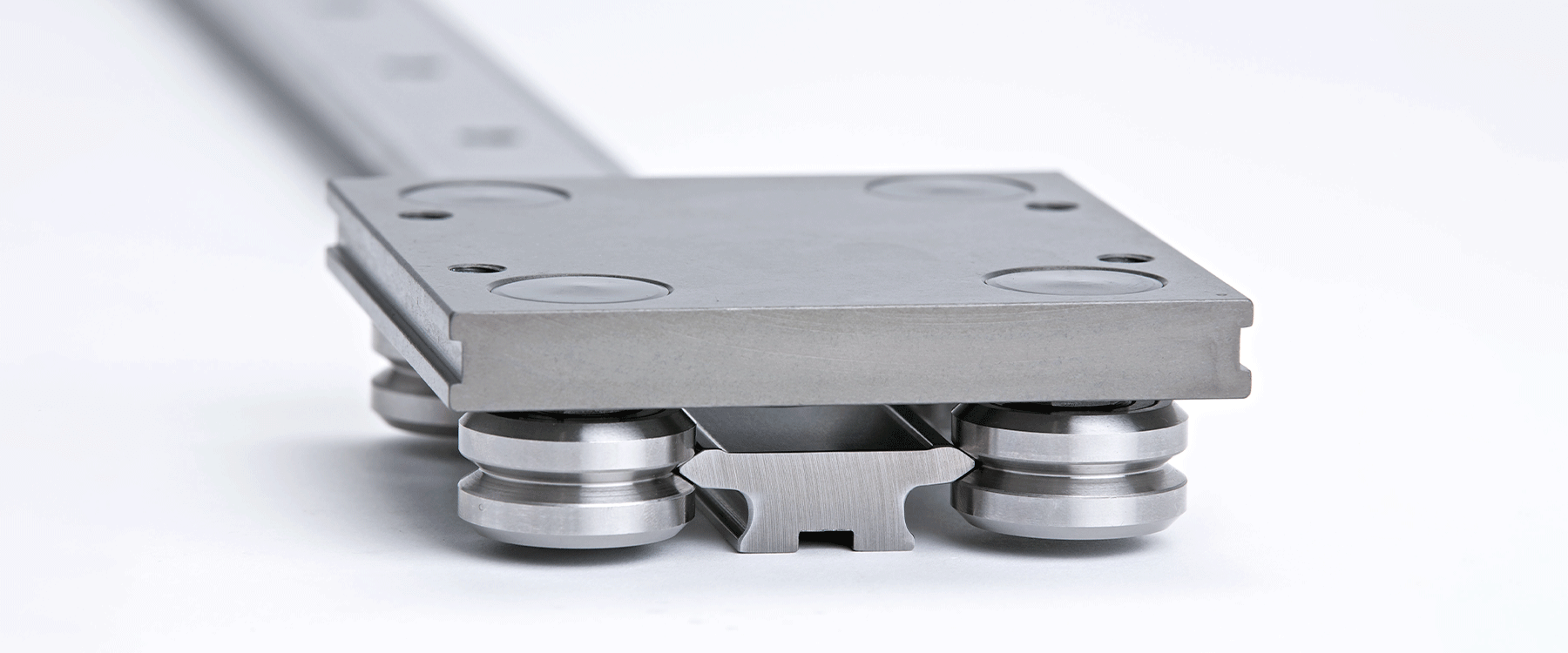
아스파라거스는 여러 나라에서 자라고 있습니다. 즉, 재배 환경이 춥거나, 덥고, 먼지가 많거나, 습할 수도 있는 등 상당히 다양하다는 것입니다. 이러한 이유 역시 엔지니어들이 HepcoMotion을 선택하게 만들었습니다. Völkers는, “V 가이드 장치는 사실상 자정기능이 가능한 장치입니다. 캐리지가 움직이면서 베어링들이 레일에서 먼지를 밀어내게 됩니다. 베어링 순환 시스템과는 다르게 모두 내부식성 장치이기 때문에 윤활이 필요가 없습니다. 아스파라거스 역시 녹에 오염될 가능성이 없습니다. 이러한 기본적인 조건이 식품산업에서는 반드시 지켜져야 합니다.“라고 전했습니다.
현장 테스트
엔지니어들은 영국 C. Wright & Son의 프로젝트 파트너들과 함께 실제 현장에서 아스파라거스 수확 기계를 시험해보았습니다. “이 현장 테스트를 통해 무엇보다 저희는 기계 배터리가 얼마나 오래 힘을 내줄 수 있는지를 알아보고 싶었습니다.”라고 Strauss는 전했습니다. 또 하나의 과제는 수확 기계의 속도였습니다. “지금까지 실제 인간이 수확하는 것보다 빠르게 수확할 수는 없었습니다. 하지만 충분한 전력 공급이 있다면 24시간 동안 문제없이 작업할 수 있습니다. 이 것이 가능해지면 미래에는 더 경제적인 수확이 가능해지고 아스파라거스의 가격도 낮출 수 있습니다.”고 전했습니다.
연관 추천 제품

문의하기
Tel 영업부: +82 (0) 31 352 7783
Email [email protected]
주소
경기도 화성시 정남면
시청로 1580-29 (백리 71-16)
우편번호: 18521
-
1580-29 Sicheong-Ro,
Jungnam-Myun, Hwasung-City,
Kyunggi-Do
(Postal Code: 18521)
제출 양식